|
Techniques
for Modular Simulation of Hybrid Systems
Joel
Esposito, Yerang
Hur, and George
Pappas
In traditional simulation
techniques all components of the system must be simulated with the same
global time step. This can decrease the efficiency of the simulation
by forcing all the components to be integrated at the smallest acceptable
time step, which is dictated by the fastest changing component
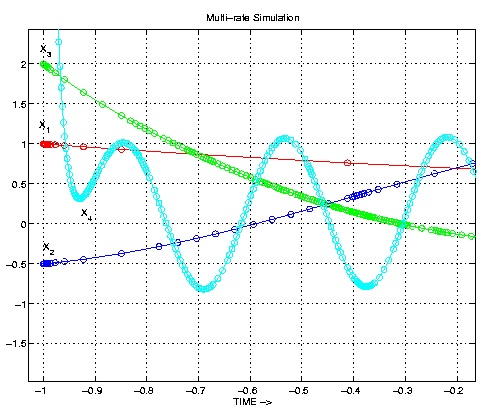
of the system. We are developing numerical techniques to enhance
and compliment existing Multi-Rate techniques, which allow different
components of coupled systems to be integrated at different rates.
The challenge here will come from that fact that the system components
are not only coupled through their continuos dynamics but also through
the discrete dynamics of hybrid systems and inter-agent messaging and
communication. However we are hoping to exploit the underlying
heiarchy present robotic systems to simplify the problem.
The underlying idea behind traditional linear multistep
integration methods, is to use local polynomial interpolations and extrapolations
to approximate the right hand side of the differential equation.
We are reconstructing the interpolants at minimal extra cost and are
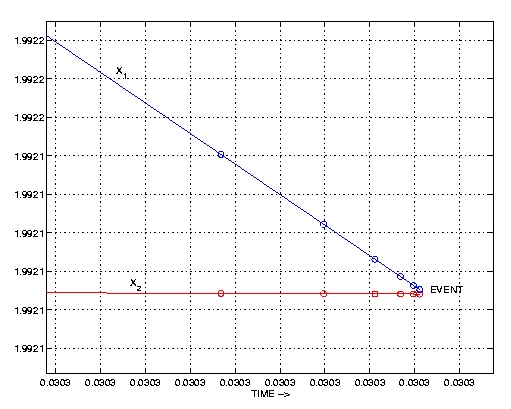
using them to approximate off-mesh point values. This approach
allows asynchronous integration and can also be used to facilitate event
detection. We are also experimenting with using the Lie Derivative
information as a heuristic for event detection. To tackle the
inter-agent communication problem a Time-Warp approach is being investigated
For
more information about embedded software for multi-agent communicating
hybrid systems and the use of the CHARON language, visit the MoBIES
Project homepage.
|