Modular Robots
|
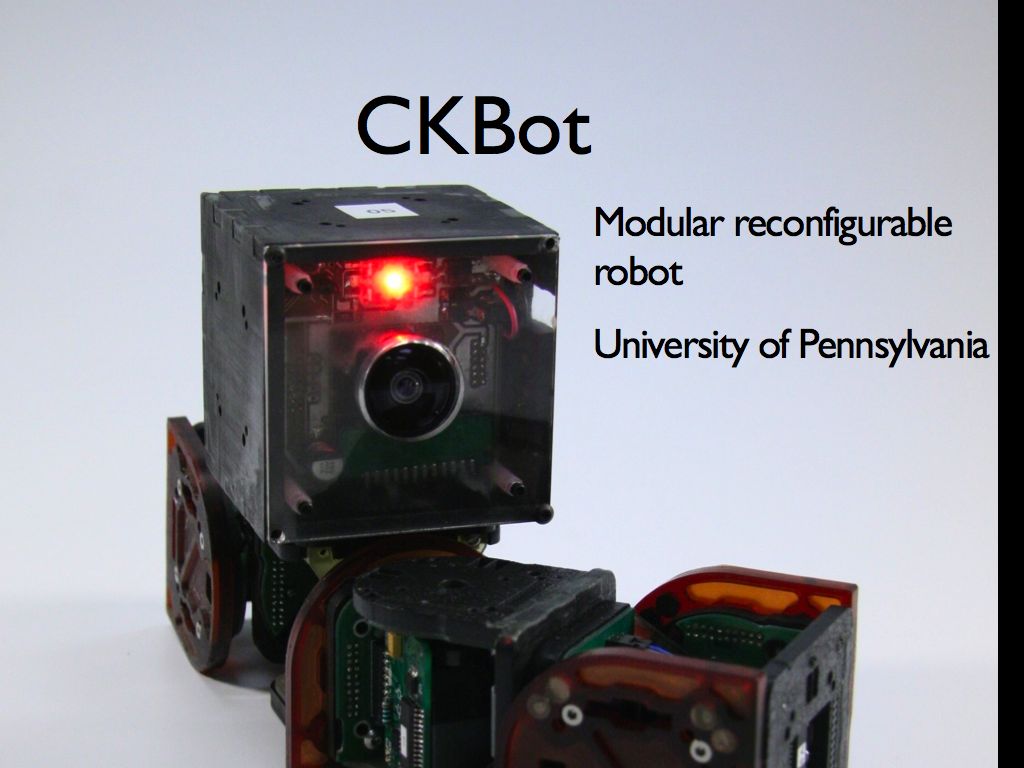
| CKBot Module |
My group has been working with Mark Yim and his students to design and implement modular robotic systems equipped with smart camera systems that the modules can use to localize themselves. We were able to use this approach to demonstrate modular systems that self assembled after an explosive event, namely a swift kick. This project has been featured in several publications and at Wired NextFest.



Publicity
Related Publications
-
Using Smart Cameras to Localize Self-Assembling Modular Robots
B. Shirmohammadi and C. J. Taylor and M. Yim and J. Sastra and M. Park and M. Dugan
First ACM/IEEE International Conference on Distributed Smart Camera, Pgs: 76-80, Sept 2007
[ pdf ] [ bib ] -
Towards Robotic Self-reassembly After Explosion
M. Yim and B. shirmohammadi and S. Jimmy and M. Park and M. Dugan and C. J. Taylor
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Pgs: 2767-2772, October 2007
[ pdf ] [ bib ]