
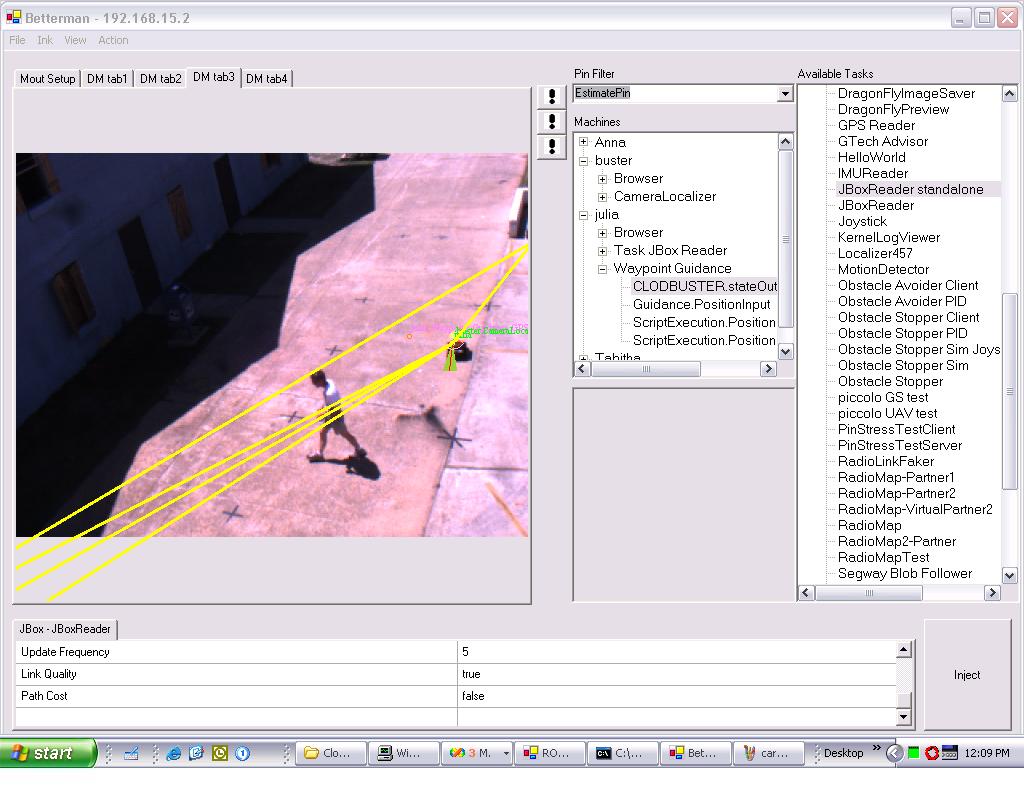
The ROCI node on which this screenshot was made (node "Tabitha") is shown here to pull together and visualize information from various sources:
- position of node "Julia" (a clodbuster robot) as reported by an onboard GPS device (dark blue circle - hard to see - and pink text string),
- position of Julia as reported by a blob localizer module on node "buster", operating on video input from a wall-mounted camera (dark blue circle and green text string),
- position, orientation and uncertainty estimate of Julia produced by a fusion filter on Julia which takes as input the above two position estimates and Julia's encoder readings (small yellow circle, protruding cone and surrounding pink ellipse),
- signal strength between various radio stations on the site (yellow lines).
A similar situation as in the previous screenshot, here projected onto the video output of the camera connected to node "buster".
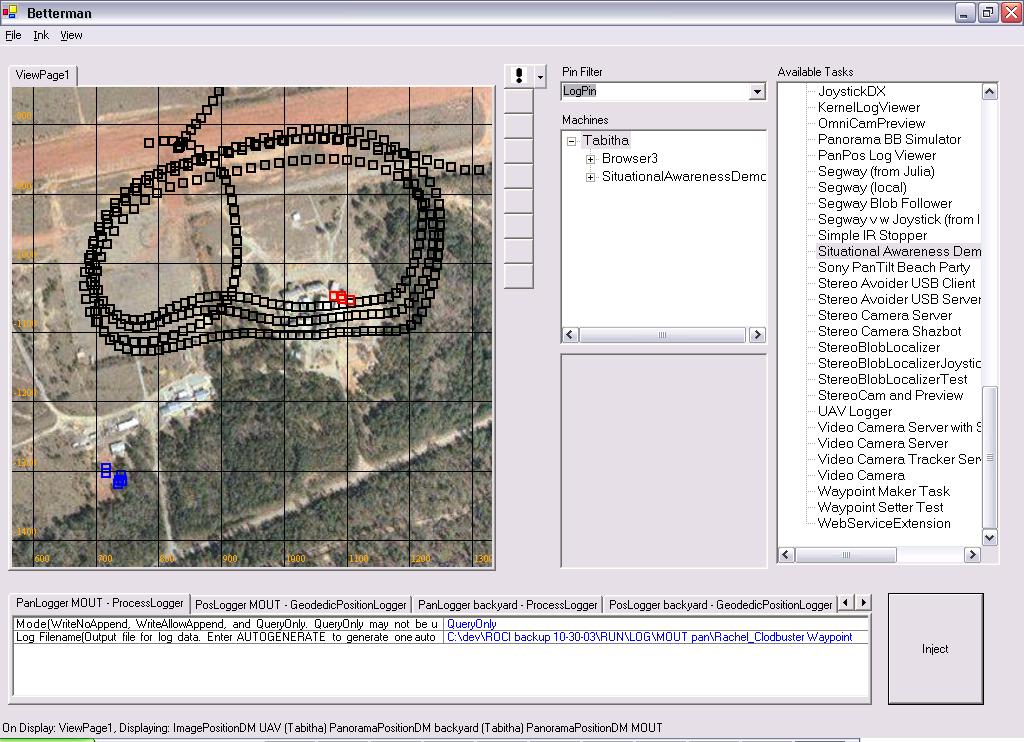
This screenshot shows the position at which images have been taken by a UAV an a UGV. This view is generated by querying image logs (logger modules attached to the output of image capture modules) on the machines for their time indices and retrieving matching entries in the machines' position logs (logger modules attached to the output of GPS modules).
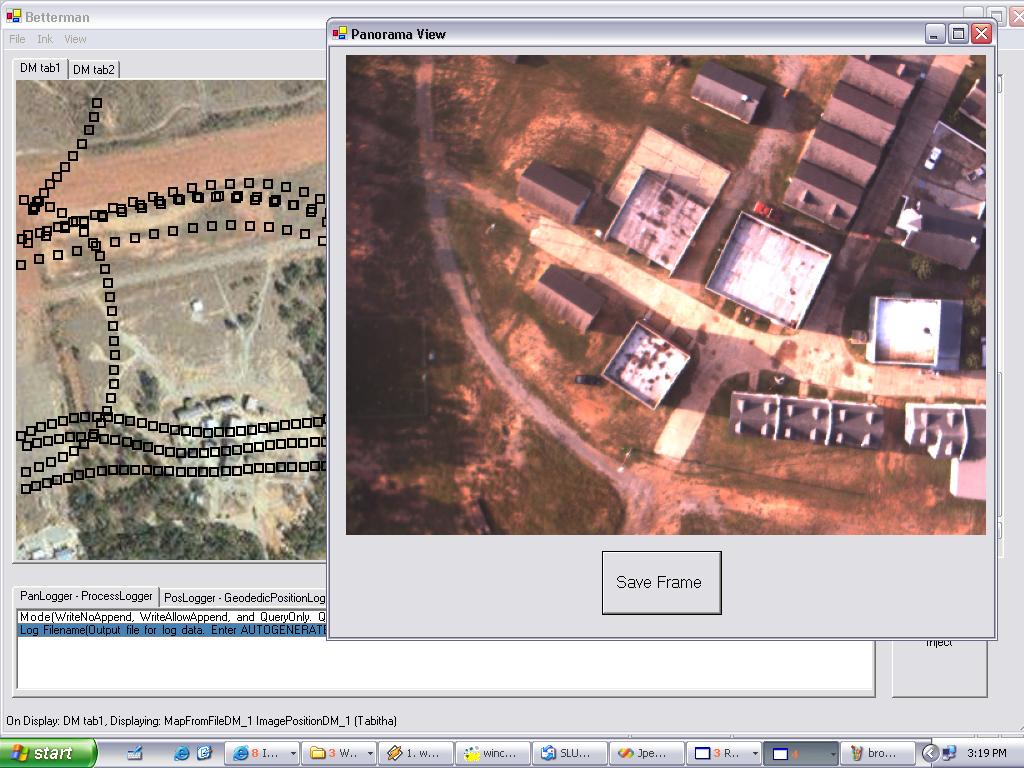
Upon clicking on one of the UAV image locations, a query to the UAV's image log is made and the ROCI returned image is displayed.
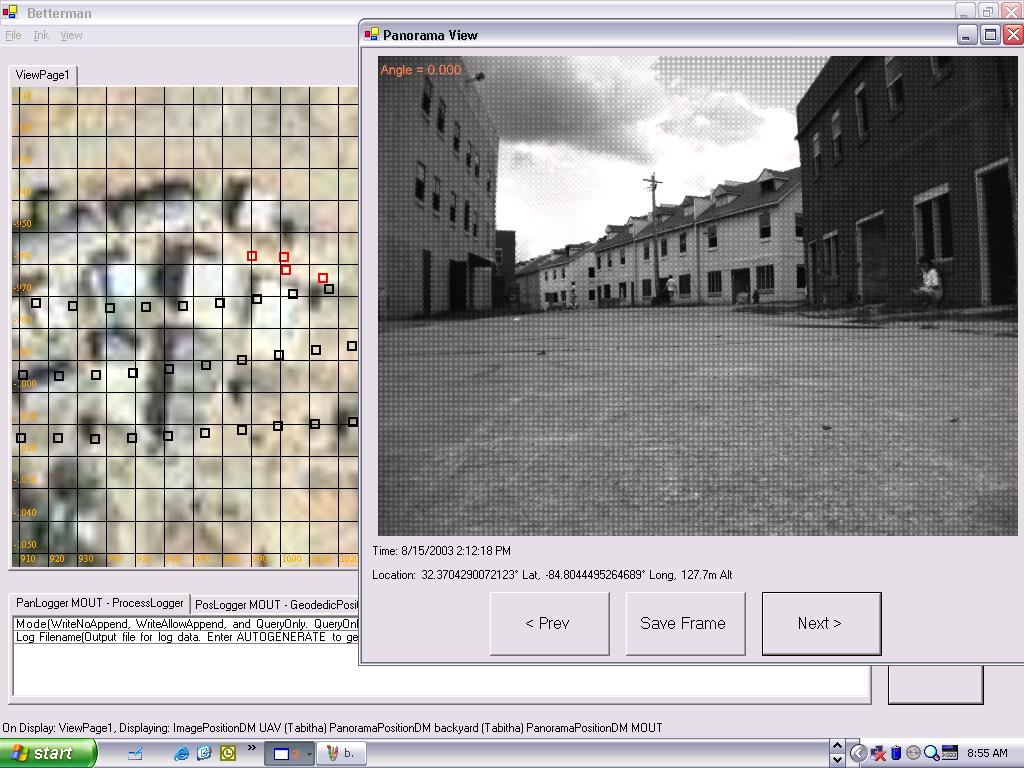
This screenshot shows the Browser displaying one of the images taken by the UGV.